 |
Sellers of e-bikes, law makers and
users should understand this,
(even if just to explain to the
police).
The power on label is not what you get at the
ground. The motor its self looses energy before the first stage reduction then
each set of gears looses some. A 2800 watt motor will give you less power with
a geared mid drive than with a direct drive, but not much. Power assisted
bicycles should be regulated like mopeds; the power at the rear axle for a
moped in Washington is limited to “2 brake horse power”. A bicycle maybe 1.5
brake hp , not that any one could tell by looking at it. So in Washington state
they let us have 1kw (input) motor, Mopeds are regulated at the factory level.
The law should be changed to read
“limited to the speed of 20mph” only! Big heavy motors can produce much more
power than is on the label. And because it takes a lot of power to climb hills
with cargo, Speed and brakes should be the only consideration.
If your vehicle is geared correctly to
climb your worst hill, your equipment will last a lot longer. And you can use
the controller to limit the amount of power output to keep the speed down to
the legal limit.
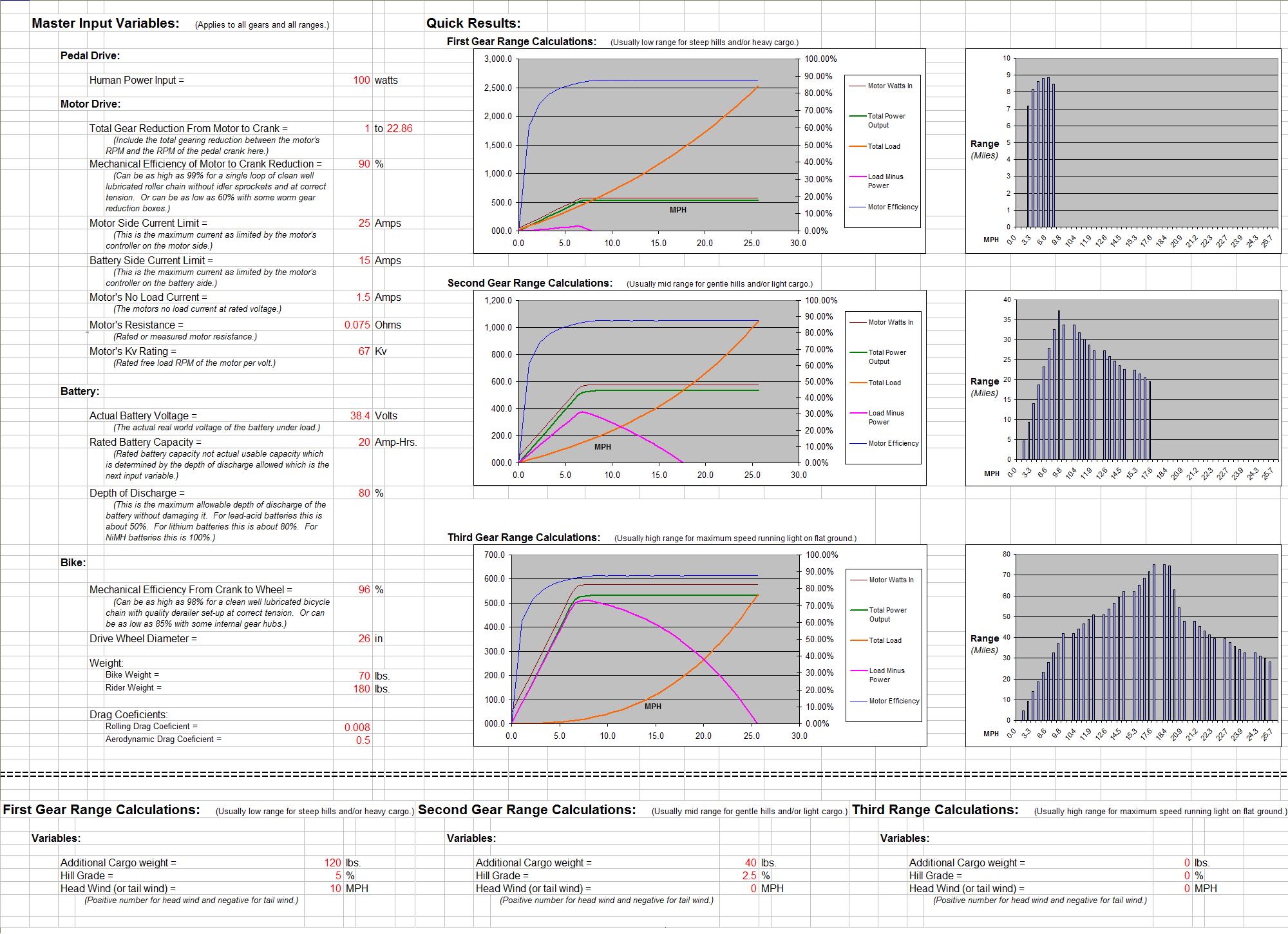
Unfortunately calculating the gears
for a particular motor is very difficult. For instance, a brushless motor would
have its peak power at half of it's unloaded rpm, if there was no current limit
set in the controller. The point where it can possibly reach its most power is
between 50% and 90% of its no load rpm, depending on the controllers battery
current limit. This point can be calculated, but it's not easy. There is a lot
of motor data out there. You can calculate it using Peak Efficiency rpm, for
example, or find it at ebikes.ca for hub-motors. Much easier to buy a kit,
but be aware of how much power you need.
With only 250 watts in Asia or Europe you pretty
much need a transmission to have a decent all around vehicle.
 |
This calculaotor can get you close
|
Gearing a motor to human speed
Beginners info
Top ten conversion kits
Buying a battery pack

Motor simulator
Even
the Stoke Monkey spins because it is a hub motor hanging on it 's
hardware. It needs to spin at about 500RPM for real hill climbing
with cargo. So consider buying a mid drive kit with planetary gears
so that the out put is a reasonable speed while keeping the motor at
a high rpm. BSS02 or BSS03 or the cyclones kits.
https://lunacycle.com/mid-drive-kits/
 |
https://www.electricbike.com/lightning-rods-mid-drive-kit/ |
https://endless-sphere.com/forums/viewtopic.php?f=28&t=57720
https://endless-sphere.com/forums/viewtopic.php?f=28&t=48682
Lightning Rods Power Graph:
https://farm8.staticflickr.com/7020/13815411015_8c5cb25ed7_o.jpg
https://endless-sphere.com/forums/viewtopic.php?f=28&t=48682
Lightning Rods Power Graph:
https://farm8.staticflickr.com/7020/13815411015_8c5cb25ed7_o.jpg
{kind=link}
The majority of the heat that can
damage the motor and controller comes from the amps of current. By choosing a
system that has higher volts, you can achieve the same amount of power with
fewer amps.
Mid-drives / Zero Trail Steering / Variable Speed Crank / Tilting trike technology
/ how to motorize a big heavy vehicle/ Hub Motors / How much power do you really need?
/ how to motorize a big heavy vehicle/ Hub Motors / How much power do you really need?
Mid-drives can be done in several different ways.
The most torque is obtained from a two stage gear
reduction before the crank-set, making it into a three stage reduction by the
time the energy gets to the wheel. Loosing too much energy.
Or you can get better efficiency if you bypass the
cranks, but that makes it impossible to climb hills without motor support.
Even if there is increased efficiency and less wear.
If you want to drive the rear wheel directly, you
may need a motor with more copper just to deal with the heat produced by slow
speed high torque hill climbing.
The reason to use the bikes gears is the motor can
stay up in the higher RPMs (allowing for a faster smaller motor). This
prevents the motor from producing waste-heat in the first place, due to bogging
down and running at low RPMs, like a hub motor might do (a direct-drive hub
spins at the RPMs of the wheel, and geared hub motors have a poor heat-shedding
path). Also motors with low pole-count allows can run at high RPMs without
experiencing the waste-heat that is usually produced by eddy-currents.
 |
| https://www.electricbike.com/bafang-bbso2-750w-mid-drive/ |
Mid-drives are usually limited to
about 1000-1200 Watts of power, since the derailleur gears can not last more
power reliably. Mid-drive chains wear out quickly.
I like the idea of powering the rear
wheel directly through a Nuvinci infinite hub gear. Or drive the wheel directly
with one gear reduction and the pedaled chain drives the hub gear, like the Elf
car does. Even if you should use a larger motor, with ability to run more amps
at a slower rpm. You may need a larger bike for this extra weight, like a large
cargo bike.
I think using a 5 or 6 speed cassette
with the cogs spaced a wee bit further apart you could use the heavier power
chain. But you may need to use an internal gear hub, because heavier duty
chains are not going to shift with a derailleur.



The picture is of a Metropolis two speed internal geared crank set, that sends only a small part of the torque through the pedaled crank at 60 rpm. Most of the torque is sent to the rear wheel by a Gates belt. Bicycle drive trains cannot take the full torque that a large motor will produce. Hard starts on a cargo bike is a very bad idea.
To drive the left side crank with a three speed Sturmy-Archer gear hub (as a geared mid-drive). Use a chain from motor to hub sprocket, and a chain or belt from a pulley mounted on the flange of the hub.
e-bike motors:
converting a hub motor to mid drive motor:

This
is a geared hub motor converted to a mid-drive.
Two
stage reduction before the crank-set.
 |
| This motor drives the crank from the left side and the rear sprockets from the right side |
 |
| old tech gearless hub motor |
When driving the cranks, so that they move at human speed with a 'gear-less' hub motor, it is less efficient than what you would get when using a fast motor with a two stage reduction, like a 'geared' hub motor, because motors were made to move fast, faster and even faster (depending on the voltage and the way they were made).
Think about how gears turn kinetic energy into
torque. “But there is so much magnetic mass that it makes up for the lack of
speed,” you may argue. So it would have a larger weight to efficiency ratio;
the newer mid-drives have smaller lighter faster, more efficient motors.
The one thing I don't like about mid-drives is that they use up your drive chain faster than human power alone (100-150watts). That is one reason I would drive the wheel directly with a belt.
I like the idea of powering the rear wheel directly through a two gear hub. Even if you should use a larger motor, with ability to run more amps at a slower rpm.
Driving the rear wheel through a two or three
speed hub would be a good way to have enough gears without driving your
sprocket driven chain. There by saving a lot of maintenance money.
A Nuvinci N171 is possibly the only hub gear that could handle the torque form a 2800 watt motor, when climbing an 8% grade with 350 to 400lbs.
 |
| Nuvinci hub gear with power input |
 |
| Direct to wheel through a gear hub -SRAM Dual Drive, 3-speed Internally-Geared-Hub (with 4 derailleur sprockets retained). https://www.electricbike.com/miles-emoulton/ |
 |
| http://www.wired.com/2011/07/electric-motorbike-can-hit-10000rpm/ |
 |
Sturmey-Archer
these are not strong enough for more than 300 watts
|

Good equipment with high precision like the Shadow Plus
dérailleur are needed for high power mid-drive application: all my chain skip
and chain slapping issues, are gone.
Hot rod or hill climber?
I have finally decided the best way to motorize a
light weight vehicle is to mount a motor behind the seat tube and run the power
to the drive wheel directly (unless you can find a variable speed gear box that
does not use friction to shift the gears). However this is best done on a
long-tail cargo bike or recumbent trike.
Mid-drives make it difficult to shift gears. And
most will turn your bike into an illegal motor cycle (unless the controller has
a speed sensor). They can drive your bicycle faster than 20mph even if you keep
your feet on the pedals.
Using a high speed, high voltage motor, with
enough gear reduction to turn the kinetic energy into enough torque thrust for
your worst hill. It could make it possible to drive more weight up steeper
hills than using a large heavy motor that is not geared. Also you can use a
larger heavier duty drive chain, or Gates belt to the drive wheel, than
mid-drives. Belts are quieter and last longer than chains.
And if your gear is set to the speed your motor
can handle on your steepest hill, you will always be in the right gear to cross
an intersection and climb a hill. But you may want to adjust your pedaling
gears to take over from the motor as soon as you’re moving fast enough.



How to build a freewheeling crank set for mid-drive motors:

This comment has been removed by the author.
ReplyDelete