 |
| https://www.youtube.com/watch?v=cdiZUszYLiA |
Field
oriented control is a better way to
make motors produce more thrust at lower and higher speeds than using
gears. With controllers having more computing power now, they can
control a motor much better than ever before. It requires a
three-phase AC motor and a more expensive controller. These would be
very good for a motorcycle that needs a wider range of torque-thrust
than a simple electric bicycle.
“field
oriented control of permanent magnet motors”
on
youtube.
By
increasing the number of phases it is also possible to increase the
torque per RMS ampere for the same volume machine. It is assumed that
iron saturation can be neglected and that only fundamental air gap
flux is taken into account.
It
has a rugged simple structure, low manufacturing cost, high torque
per unit volume, and the absence of rotor windings resulting in
simple control schemes and decreased losses. Therefore, this kind of
motor is an attractive candidate for numerous e-bike and electric car
applications.

 |
http://www.appliancedesign.com/articles/89485-motors-motor-control-asymmetric-lamination
Asymmteric Lamination
|
Asymmetric
Motor Windings
Asymmetric
motors require less voltage to achieve the same maximum rpm and
should improve efficiency while reducing current requirements.
The other idea is that a magnet as the driving force for magnetic flux,would work better than brute force originated by copper coils.
 |
| http://visforvoltage.org/forum/14118-concepts-ebike-propulsion-2 |
Asynchronous motors
This type of motor has zero coasting resistance, even less than a geared hub motor. If you run out of energy, you can use it like a regular bike plus the extra weight, like walking a heavy cargo bike.Due to missing magnets you can overheat it more than a synchronous motor.
The only limit is the isolation of the wires, this is usually like 200 degrees Celsius vs around 100 degrees for magnets, after which the magnets become useless pieces of metal.
 |
| https://endless-sphere.com/forums/viewtopic .php?f=1&t=88905&p=1299329#p1299329 |
The
biggest problem with small motors is they need to spin fast in order
to develop power and efficiency. A wide axial-flux motor would be a
much slower motor because the edge of a wide motor is moving faster
than the center. You would need to make it larger than the crank
arm's circle. But it may work better if the diameter of the motor is
close to the size of a wheel. Making a very large diameter hub motor
may be easier than a crank motor.
An
axial flux motor is different from conventional electric motors due
to the different path of the magnetic flux. In conventional motors
the flux flows radially through the air gap between the rotor and the
stator.
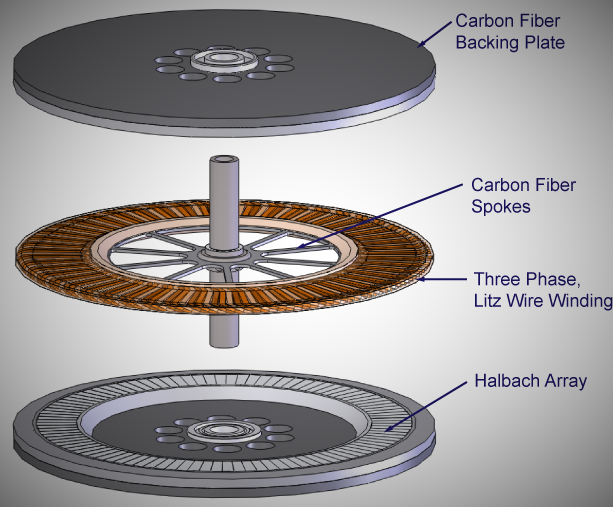
A high pole count axial-flux motor would not need an iron core. Using nothing but copper and made extremely thin, would be very highly efficient because there is no hysteresis. And no cogging effect.
Basically you are attempting to create a CSIRO / Launchpoint like motor, but with even higher pole counts. (60+ poles?) The higher pole counts allows for lower rpm operation which is necessary for human pedaling cadence. A Halbach Magnet configuration focuses the magnetic forces within the motor and removes the need for iron.
 |
Concepts for eBike Propulsion |
No comments:
Post a Comment